PCCでは、クラック状の洞窟における3Dスキャン試行を目的として2023年7月2日(日)に「大沢の熊穴」のケイビングを行いました。
参加メンバー5名
L臼倉、SL小竹〇、濱田、土橋〇、川崎〇
(〇印がLiDAR搭載iPhone所持者)
PCCではこれまで、主に横穴の洞窟にてLiDAR搭載iPhoneによる3Dスキャン測量を行ってきた。今回は上下方向の洞窟空間での3Dスキャンに初挑戦となる。
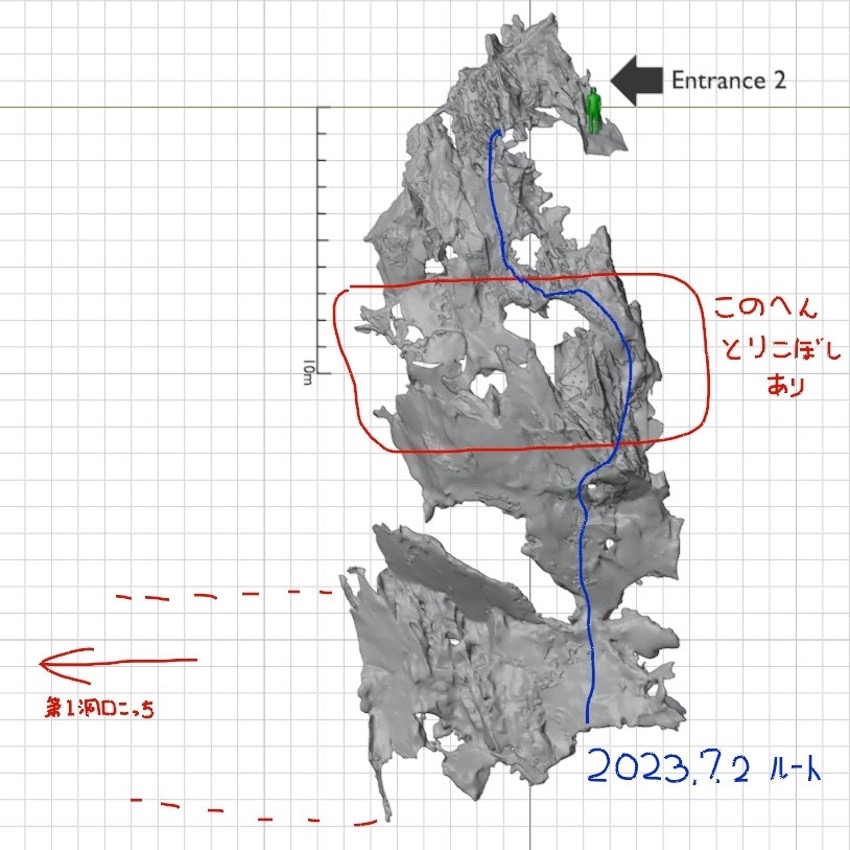
「大沢の熊穴」は、全体にわたりチムニーで移動するようなクラック状の厚みのない空間が大部分を占める洞窟で、上下方向に空間が伸びる第二洞口側と、横方向へ伸びる第一洞口側の2つの部分に分けられる。
今回はまず洞窟の最上部にあたる第二洞口より入洞してロープ1本を垂らし、洞窟構造を確認しながら一度全員で下層部まで下りた。
下層部から第一洞口側の3Dスキャンを土橋、川崎へお願いし、小竹は第二洞口まで登り返したうえで、下りながら3Dスキャンを実施した。


今回のような縦方向の移動や、匍匐で進むような狭い場所など、歩いて移動ができない空間で3Dスキャンを行うには少しコツが必要である。まず体勢を安定させた状態でiPhoneを持ち、手を動かせる範囲で周囲の3Dスキャンを行う。その後、一時停止ボタンを押してから少し進み、体勢を安定させてから3Dスキャンを再開する。これを何度も繰り返すことで、長い距離を1つの3Dスキャンデータとして記録していく。
一時停止をしている間はiPhoneが位置を見失わないよう、カメラ・LiDARセンサから周囲が見える状態を保たなければならない。今回はiPhoneケースにDIYでフックを取り付けることで、ケイビングスーツの胸ポケットにiPhoneを露出させて引っ掛けられるよう工夫を行い、一時停止中に両手両足を使って移動できるようにした。
この方法は概ね上手くいったが、ロープの取り回しの際に意図せずセンサを手で隠してしまったり、狭い箇所でのチムニー移動でiPhoneが壁に近づきすぎてしまったりして、スキャンを途切れさせてしまうこともあった。

川崎は、第二洞と第一洞の連結部付近をスキャン予定であった。
狭いクラックを進み、上、真ん中(菱形の穴)、下の三つあるルートから上のルートを通った。斜めにクラックが伸びている上のルートの一番奥の部分をスキャンした。その後、下降して戻って濱田と臼倉と合流した。
今回は菱形の穴がどこかわからず、第二洞から第一洞に抜けることができなかった。
また、一部だけスキャンしたので、次回第二洞から第一洞に抜けるルートをリベンジしたい。
結果として今回は、第二洞口側の縦空間のおおよそ3Dスキャンすることができた。一部取りこぼしを残してしまったが、まずまずの成果である。
次の機会を作って、全エリアの3Dスキャン完了を目指したい。
ご参考:洞窟の3Dスキャンに関する知見は以下にまとめています。
https://github.com/CaveMapper/CaveMapper/wiki/wiki_JP
(川崎 記)

